
1 背景
在实际工作中,我们经常涉及判断一个对象或者数据是否存在于内存或者数据库。往往大家会想到HashMap,但是这时候有一个问题,存储容量占比高,考虑到负载因子的存在,通常空间是不能被用满的,而一旦你的值很多例如上亿的时候,可行性就差了。
另一方面,如果很多请求是在请求数据库根本不存在的数据,那么数据库就要频繁响应这种不必要的IO查询,如果再多一些,数据库大多数IO都在响应这种毫无意义的请求操作,为了解决这一个问题,过滤器由此诞生!
2 布隆过滤器
过滤原理:布隆过滤器(Bloom Filter)大概的思路就是,当你请求的信息来的时候,先检查一下你查询的数据我这有没有,有的话将请求压给数据库,没有的话直接返回。
布隆过滤器是一个 bit 向量或者说 bit 数组。
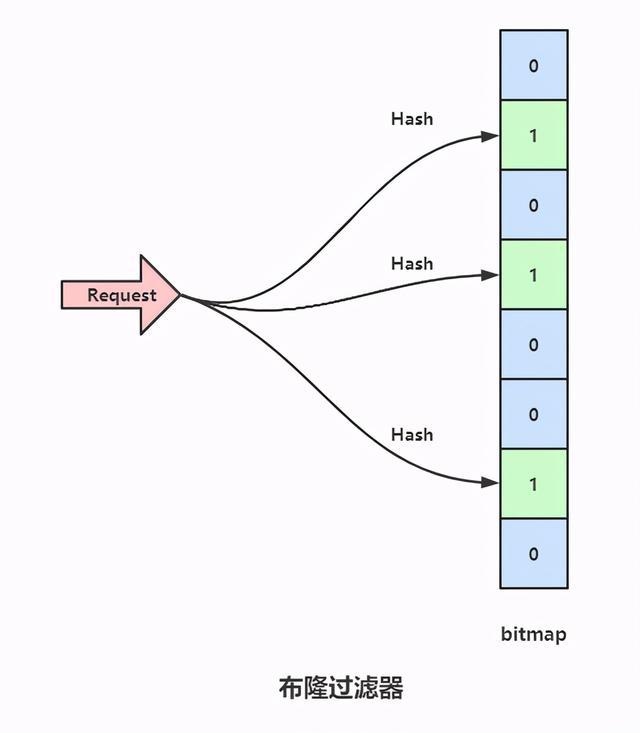
如图,一个bitmap用于记录,bitmap原始数值全都是0。
当一个数据存进来的时候:
- 用三个Hash函数分别计算三次Hash值,并且将bitmap对应的位置设置为1,上图中 bitmap 的1,3,6位置被标记为1;
- 这时候如果一个数据请求过来,依然用之前的三个Hash函数计算Hash值,如果是同一个数据的话,势必依旧是映射到1,3,6位,那么就可以判断这个数据之前存储过;
- 如果新的数据映射的三个位置,有一个匹配不上,加入映射到1,3,7位,由于7位是0,也就是这个数据之前并没有加入进数据库,所以直接返回。
3 存在的问题
3.1 误判
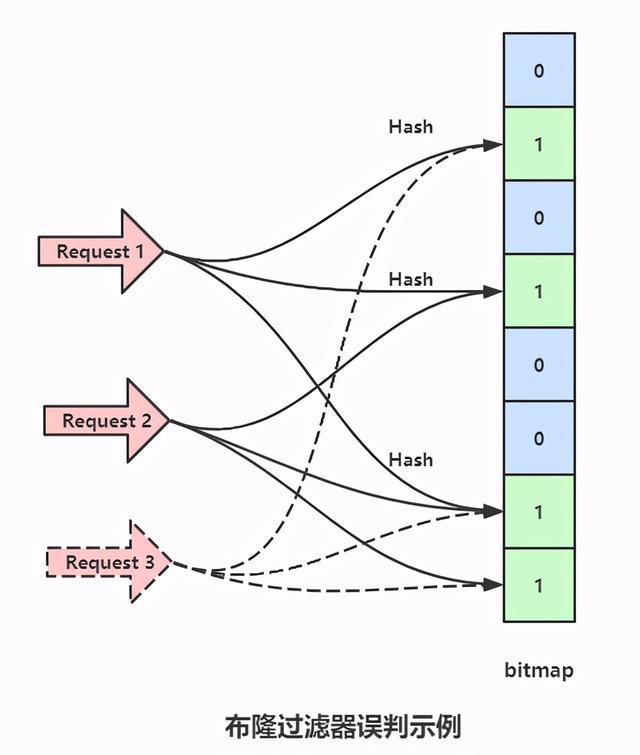
如上图所示,假如有这么一个情景,放入数据包1,将bitmap的1,3,6位设置为了1。放入数据包2时将bitmap的3,6,7位设置为了1,此时一个并没有存过的数据包请求3。做三次哈希之后,对应的bitmap位点分别是1,6,7。这个数据之前并没有存进去过,但是由于数据包1和2存入时将对应的点设置为了1,所以请求3也会压到数据库上,这种情况会随着存入的数据增加而增加。
所以,布隆过滤器只能够得出两种结论:
- 当hash对应的位置出现0的时候,就表明一定不存在;
- 当全是1的时候,由于误判的可能,只能表明可能存在。
3.2 无法删除
布隆过滤器无法删除的原因有二:
- 由于有误判的可能,并不确定数据是否存在数据库里,例如数据包3。
- 当你删除某一个数据包对应位图上的标志后,可能影响其他的数据包。
例如上面例子中,如果删除数据包1,也就意味着会将 bitmap 1,3,6位设置为0。此时数据包2来请求时,会显示不存在,因为3,6两位已经被设置为0。
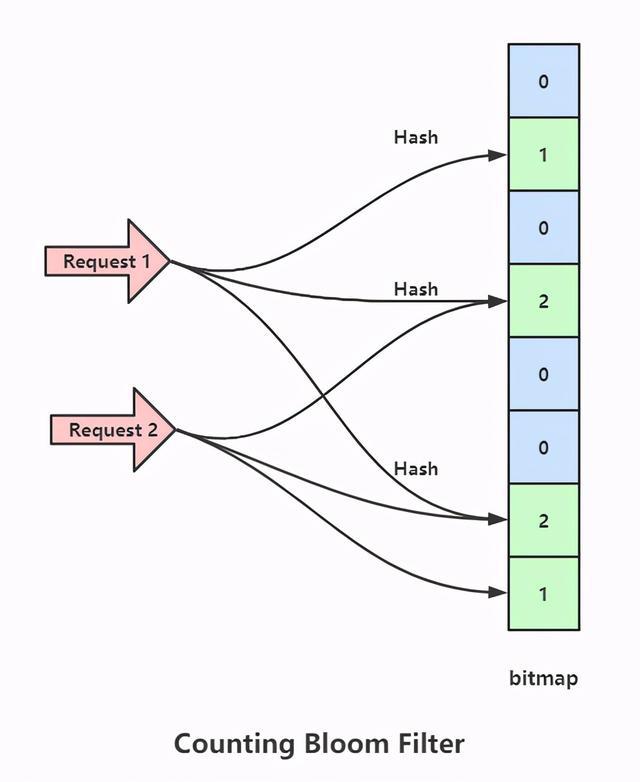
为此还出现了一个改进版的布隆过滤器,即 Counting Bloom filter,可以用来测试元素计数个数是否绝对小于某个阈值,如下图所示。
这个过滤器的思路:将布隆过滤器的bitmap更换成数组,当数组某位置被映射一次时就+1,当删除时就-1,这样就避免了普通布隆过滤器删除数据后需要重新计算其余数据包Hash的问题。
但实际上也无法解决删除的问题,原因是由于一开始就存在误判的可能,如果在删除的时候,一个本来不存在的由于误判而进行了删除,就会使得其他原本正确的出现错误计数。
这个问题造就了其软肋,布隆过滤器就好比是印迹,来过来就会有痕迹,就算走了也无法清理干净。
比如你的系统里本来只留下 1kw 个元素,但是整体上来过了上亿的流水元素,布隆过滤器很无奈,它会将这些流失的元素的印迹也会永远存放在那里。随着时间的流失,这个过滤器会越来越拥挤,直到有一天你发现它的误判率太高了,不得不进行重建。
3.3 其他问题
查询性能弱
是因为布隆过滤器需要使用多个 hash 函数探测位图中多个不同的位点,这些位点在内存上跨度很大,会导致 CPU 缓存行命中率低。
空间效率低
是因为在相同的误判率下,布谷鸟过滤器的空间利用率要明显高于布隆,空间上大概能节省 40% 多。不过布隆过滤器并没有要求位图的长度必须是 2 的指数,而布谷鸟过滤器必须有这个要求。从这一点出发,似乎布隆过滤器的空间伸缩性更强一些。
3.4 参数选择
布隆过滤器在构建时,有两个重要的参数:
- 一个是Hash函数的个数 k;
- 另一个是 bit 数组的大小 m。
过小的布隆过滤器很快所有的 bit 位均为 1,那么查询任何值都会返回“可能存在”,起不到过滤的目的了。布隆过滤器的长度会直接影响误报率,布隆过滤器越长其误报率越小。
另外,哈希函数的个数也需要权衡,个数越多则布隆过滤器 bit 位置位 1 的速度越快,且布隆过滤器的效率越低;但是如果太少的话,那我们的误报率会变高。
我们参考如下一个图: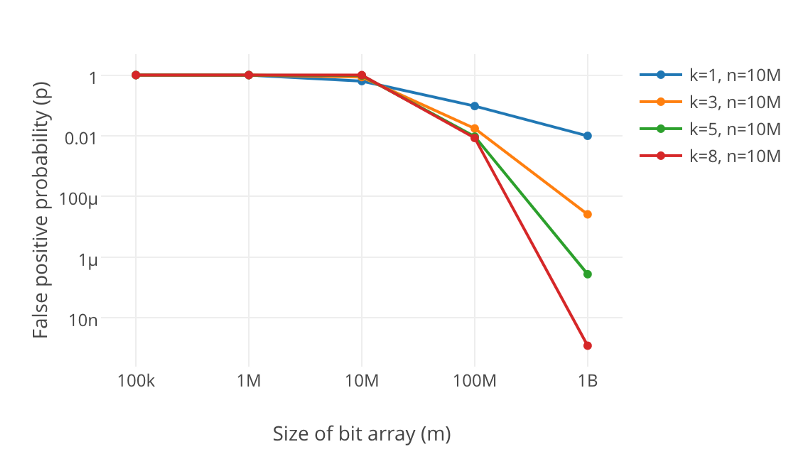
其中:
- k 是Hash函数的个数;
- m 是布隆过滤器数组的长度;
- n 是需要插入元素的个数;
- p 是误报率。
3.5 误报率
如果 m 是位数组中的比特数,则在插入元素期间某一特定比特位不被某个哈希函数设置为 1 的概率是:
如果哈希函数的数量是 k,则通过 k 个哈希函数都未将该位设置为 1 的概率是:
那么,如果我们插入了 n 个元素,某个位为 1 的概率,我们利用反向概率就可以求得为:
现在我们要判断一个元素是否在集合中,假设这个元素本不在集合中,理论上来讲,经过 k 个哈希函数计算后得到的位数组的 k 个位置的值都应该是 0,如果发生了误判,即这 k 个位置的值都为 1,这就对应着误判率如下:
参考极限公式:
3.6 最优的k
这里存在两个互斥:
- 如果哈希函数的个数多,那么在对一个不属于集合的元素进行查询时得到0的概率就大;
- 如果哈希函数的个数少,那么位数组中的0就多。
为了得到最优的哈希函数个数,我们需要根据上一节中的错误率公式进行计算。
我们首先对误判率两边取对数:
我们的目的是求最优的k,且最优就表明误判率p要是最小,所以两边对k求导:
另$p’=0$就有:
所以:
3.7 最优的m
根据上面求出的最优 k,我们带入误判率 p 的公式就有:
将最优的 k 代入:
两边同时取 ln 就有:
3.8 估算 BF 的元素数量n
其中:
- n 是估计 BF 中的元素个数;
- t 是位数组中被置为 1 的位的个数。
4 代码参考
1 | import mmh3 |
参考文章:
布隆过滤器(Bloom Filter)的原理和实现
聊聊Redis布隆过滤器与布谷鸟过滤器?一文避坑
Counting Bloom Filter 的原理和实现
详解布隆过滤器的原理,使用场景和注意事项